

Tác dụng của hệ thống cân bằng điện tử ESC/ESP/VSC/DSC/VSA
Chương trình ổn định điện tử (ESP) tăng cường an toàn chủ động trong mọi điều kiện lái xe. Đặc biệt khi vào cua, hay nói cách khác, khi có lực tác động bên, ESP sẽ ổn định xe và giữ xe an toàn trên làn đường. ABS và TCS “chỉ” hoạt động theo hướng dọc.
Cân bằng điện tử ESC/ESP/VSC/DSC/VSA nhận biết các điều kiện lái xe quan trọng, chẳng hạn như phản ứng hoảng sợ trong các tình huống nguy hiểm và ổn định xe bằng cách phanh từng bánh riêng lẻ và can thiệp điều khiển động cơ mà không cần đạp phanh hoặc chân ga.
Cân bằng điện tử ESC/ESP/VSC/DSC/VSA phản ứng theo cách vượt xa khả năng của người lái và tự động “lái” xe trở lại đúng hướng bằng cách áp dụng phanh có chọn lọc. Nói cách khác, cân bằng điện tử ESC/ESP/VSC/DSC/VSA đảm bảo rằng chiếc xe hoạt động theo cách thông thường – ngay cả trong những tình huống khắc nghiệt nhất. Thay vì lao ra xa hoặc bắt đầu trượt, chiếc xe sẽ tuân thủ các yếu tố đầu vào từ vô lăng và người lái vẫn hoàn toàn kiểm soát được.
Mối quan hệ giữa các lực tác dụng lên ô tô
Mối quan hệ giữa phía trước khi vào cua và lực ly tâm trong các lượt
Khi xe quay đầu, lực ly tâm có tác dụng hướng ra bên ngoài chỗ rẽ. Chống lại lực này, lực vào cua đóng vai trò là lực hướng tâm được tạo ra bởi lốp xe. Có thể lái xe trong khi rẽ khi lực ly tâm và lực vào cua cân bằng nhau. Miễn là xe duy trì các điều kiện của lực vào cua = lực ly tâm, nó có thể duy trì ổn định chuyển hướng.
Lực vào cua thay đổi theo các yếu tố như hệ số ma sát của mặt đường, hiệu suất bám của lốp, tốc độ quay vòng … Mối quan hệ giữa hai yếu tố này như sau:

Hệ số ma sát của mặt đường; lực vào cua tăng với hệ số lớn hơn
Hiệu suất kẹp lốp; Lực vào cua tăng lên với hiệu suất bám cao hơn
Đối với lực ly tâm, tốc độ quay; Lực ly tâm tăng với tốc độ quay cao hơn
Giám sát cân bằng của xe ô tô
Giữ tay lái quay ở một góc cố định và đi với tốc độ cố định làm cho xe chuyển động theo đường tròn có bán kính cố định. Tăng tốc độ của xe tại điểm mà lực ly tâm vượt qua lực vào cua, làm cho xe chuyển động bên trong hoặc bên ngoài cung đường ban đầu do bị trượt bánh hoặc bên trong vòng cung do lái xe quá tốc độ. Bên cạnh đó việc giữ vòng cung ban đầu được gọi là lái trung tính. Các đặc tính lái thực tế (lái dưới hoặc lái quá mức) được tạo ra bởi một chiếc xe cụ thể phụ thuộc vào mối tương quan giữa sự phân bổ trọng lượng giữa bánh trước và bánh sau, đặc điểm kỹ thuật của lốp, hệ thống treo và hệ dẫn động (ví dụ 4WD).
Xe ô tô ở số N: Lực vào cua và lực ly tâm cân bằng
Xe ô tô đi quá giới hạn: Bán kính quay vòng trở nên nhỏ hơn khi xe tiếp tục quay đầu
Xe ô tô quay ngược chiều: Bán kính quay vòng trở nên lớn hơn khi xe tiếp tục quay đầu
Điều khiển hệ thống cân bằng điện tử ESC/ESP/VSC/DSC/VSA
Ý định của người lái xe được đo bằng cảm biến góc lái (ví dụ: người lái xe muốn đi đâu) và cảm biến áp suất (ví dụ: người lái xe đang đạp phanh). Các giá trị đầu vào này được so sánh với các tín hiệu của cảm biến G bên và cảm biến tỷ lệ chệch hướng. Miễn là hành vi thực tế của xe phù hợp với ý định của người lái xe, tình huống được coi là hoạt động bình thường và ESP sẽ không hoạt động. Nếu có sự khác biệt lớn giữa hành vi thực tế của phương tiện và ý định của người lái xe, tình huống đó được coi là tình trạng lái xe không ổn định. Trong trường hợp lái xe quá tốc độ, ESPCM tạo ra một mô-men xoắn âm ngược với hướng quay đầu của xe. Trong trường hợp xảy ra tình huống thiếu lái xe, ESPCM tạo ra một mô-men xoắn dương theo hướng quay đầu của xe. Mô-men xoắn được tạo ra bằng cách tác động phanh của (các) bánh xe riêng lẻ. Khi lực phanh trên mỗi bánh xe khác nhau, trên thân xe xuất hiện một lực quay (mômen quay) và làm cho xe quay ngược chiều chuyển động của nó.
Để tạo ra mô men xoắn cộng (điều kiện dưới đáy), các phanh sau phải được áp dụng:
• Bánh sau bên trong
• Bánh xe bên trong phía trước (đến mức mở rộng của một cấp độ cụ thể)
Để tạo ra mô men lệch âm (điều kiện quá tải), các phanh sau phải được áp dụng:
• Bánh trước bên ngoài
• Bánh xe bên ngoài phía sau (mở rộng đến một cấp độ cụ thể)
Thí dụ:
Nếu tốc độ ngáp dự kiến là 20 độ / giây và đầu ra cảm biến tốc độ ngáp chỉ là 10 độ / giây, điều này có nghĩa là chuyển động của xe không được lái nhiều như người lái dự định dẫn đến việc lái xe bị trượt. Khi phát hiện thấy dấu hiệu lệch bánh xe, áp suất thủy lực được tạo ra bởi động cơ ESP và truyền đến mặt trong của bánh sau để tăng mô men xoắn đồng thời giảm mô-men xoắn động cơ.
Ngược lại, đầu ra của cảm biến tỷ lệ chệch hướng lớn hơn tỷ lệ chệch hướng dự kiến, điều này có nghĩa là chuyển động của xe đang quay nhiều hơn dự định của người lái dẫn đến việc lái xe quá đà. Khi phát hiện hiện tượng lệch bánh xe, áp suất thủy lực sẽ được truyền đến bánh trước bên ngoài để giảm mômen chệch hướng.
Tín hiệu đầu vào và đầu ra của hệ thống cân bằng điện tử ESC/ESP/VSC/DSC/VSA
Bộ điều khiển điện tử (ECU)
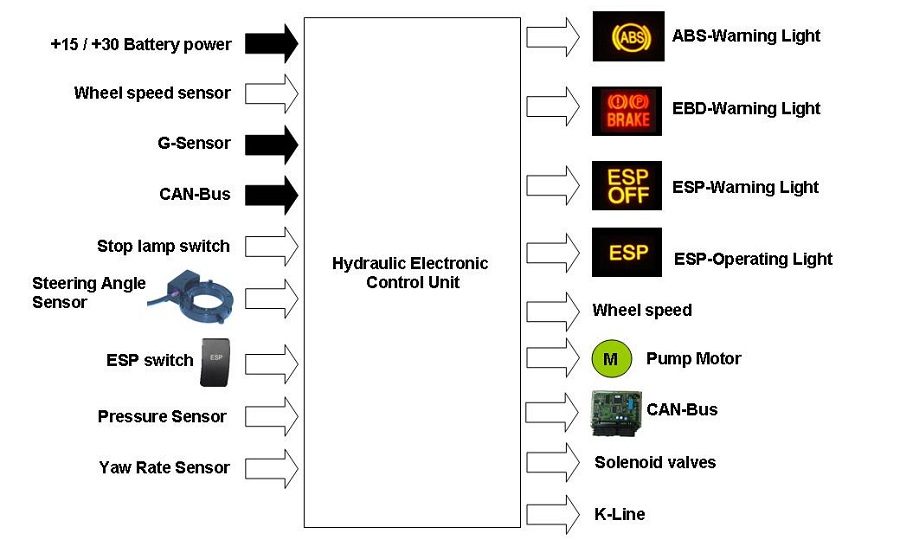
Bộ điều khiển là một phần không thể thiếu của bộ ESP. Một cảm biến bánh xe ở mỗi bánh xe sẽ gửi tín hiệu tốc độ bánh xe đến mô-đun điều khiển. Các đầu vào khác có liên quan của ESP với ECU là ví dụ:
– Tỷ lệ ngáp
– Cảm biến góc lái
– Cảm biến áp suất
Mô-đun điều khiển nhận được nguồn điện liên tục từ mạch pin và được thiết kế cho điện áp làm việc từ 9 đến 16V. Khi bật khóa điện, mô-đun điều khiển được cấp điện và đèn cảnh báo ESP bật sáng như một phần của quá trình kiểm tra chức năng. Nếu hệ thống hoạt động theo thứ tự, đèn sẽ tắt sau 3-5 giây. ECU cũng kết hợp các chức năng ABS, TCS và EBD (vui lòng tham khảo phần ABS / TCS để được giải thích chi tiết). Khái niệm an toàn luôn ưu tiên cho chức năng phanh. Van ESP được kết hợp trong mạch thủy lực theo cách luôn có thể phanh được. Mô-đun điều khiển giám sát các chức năng bên trong của chính nó và các thành phần hệ thống ESP / ABS / TCS khác. Nếu lỗi bên trong xảy ra trong mô-đun điều khiển, mã sự cố chẩn đoán sẽ được tạo ra, đèn cảnh báo ABS, TCS và ESP sẽ bật sáng và hệ thống ESP / ABS / TCS sẽ bị vô hiệu hóa.
Ghi chú:
Luôn tiếp đất cho chính mình (ví dụ như trên khối động cơ), trước khi chạm vào mô-đun điều khiển và tránh chạm vào các chân đầu cuối.
Tỷ lệ Yaw và bên G – cảm biến
Tỷ lệ Yaw và Cảm biến G bên

Cảm biến tốc độ nghiêng bao gồm một mô-đun kim loại được gắn trên một van điều tiết bên trong để ngăn quá tải cơ học của các phần tử cảm biến được gia công vi mô. Các thiết bị điện tử bổ sung cho giao diện tín hiệu ở mặt sau của mô-đun được kết nối qua một lá linh hoạt với các chân đầu cuối. Phần tử cảm biến tốc độ yaw và một phần tử được gia công vi mô bổ sung cảm nhận gia tốc bình thường đối với hướng lái xe được đặt trên một hỗn hợp gốm bên trong mô-đun kim loại. Mục đích của Cảm biến ngáp là đo lường các tác động vật lý của hành động ngáp. Ngoài ra, một thiết bị để đo gia tốc bên cũng được tích hợp vào Cảm biến Tỷ lệ Yaw. Thiết bị này được gọi là Cảm biến G bên.
Ghi chú:
Cảm biến rất nhạy cảm với gia tốc sốc. Do đó, nên tháo Cảm biến ra khỏi xe trong trường hợp sửa chữa thân xe.
Giới hạn tín hiệu trên và dưới
Loại logic này được áp dụng cho hầu hết các cảm biến trong xe. Bằng cách xác định ngưỡng dưới và ngưỡng trên, Thiết bị Điều khiển có khả năng phát hiện các lỗi cảm biến hoặc các vấn đề về hệ thống dây điện.
Nguyên tắc đo của cảm biến tỷ lệ Yaw
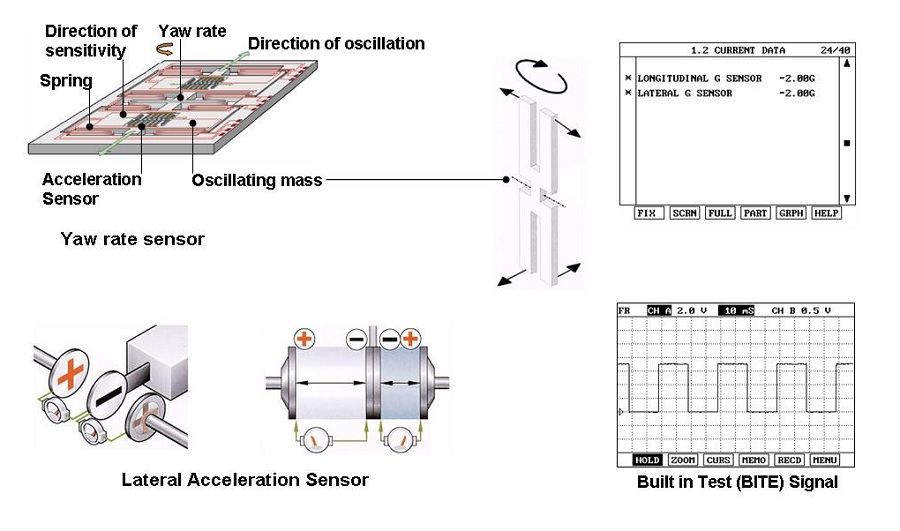
Cảm biến tốc độ nghiêng dựa trên hoạt động của các nĩa điều chỉnh siêu nhỏ. Mặt phẳng trong đó những cái dĩa này dao động dịch chuyển khi ô tô quay quanh trục thẳng đứng của nó. Sự thay đổi này được đánh giá bằng điện tử.
Cảm biến tỷ lệ lệch dựa trên việc phát hiện lực Coriolis bình thường đối với các khối lượng dao động lệch pha. Các khối lượng địa chấn được treo bằng lò xo đang dao động dọc theo hướng được chỉ ra bởi các mũi tên màu xanh lá cây. Các phần tử gia tốc đang cảm nhận lực Coriolis được đưa vào bởi một tốc độ nghiêng được áp dụng trên mặt phẳng cảm biến bình thường.
Khoảng cách giữa cấu trúc của các phần tử này bị thay đổi dẫn đến sự thay đổi công suất theo hướng nhạy cảm. Khi đó tín hiệu chênh lệch của hai tụ điện tỷ lệ với tốc độ yaw.
Tự kiểm tra Cảm biến tỷ lệ Yaw
Thiết bị Điều khiển ESP cung cấp Tín hiệu Kiểm tra Tích hợp (BITE) cho Cảm biến Tỷ lệ Yaw.
Tín hiệu đầu ra của cảm biến tỷ lệ lệch được chồng lên bởi điện áp tham chiếu được tạo bên trong 2,5V. Các chức năng kiểm tra và an toàn của cảm biến hoàn chỉnh được thực hiện bằng một tín hiệu xoay chiều được kích hoạt bên ngoài tại PIN 2 của đầu nối cảm biến.
CU sẽ thiết lập một DTC nếu điện áp đầu ra của cảm biến tỷ lệ lệch trên hoặc dưới giới hạn của nó.
Nguyên tắc đo của cảm biến gia tốc bên
Giữa hai tấm tĩnh điện có cùng cực, một phần tử silicon nhiễm điện có cực ngược chiều được gắn vào đầu của một cánh tay đòn. Giữa ba bản này tạo ra hai điện trường do các điện dung C1 và C2 tạo ra. Các điện dung C1 và C2 thay đổi theo gia tốc bên. Sự thay đổi này có thể được sử dụng để tính toán hướng và lượng gia tốc bên tác động lên xe. Cảm biến tương tự cũng có thể được sử dụng làm cảm biến gia tốc dọc nếu nó được lắp đặt theo hướng di chuyển. Đối với gia tốc bên 0g, cảm biến tạo ra tín hiệu đầu ra có điện áp 2,5V.
Cảm biến góc lái

Mục đích của Cảm biến góc lái là để cảm nhận ý định của người lái xe. Đầu ra của Cảm biến góc lái được so sánh với đầu ra của Cảm biến tốc độ nghiêng, do đó cho phép HECU phát hiện tình trạng thiếu hoặc quá mức. Hai loại cảm biến góc lái khác nhau được sử dụng. Những kiểu này được gọi là kiểu Ngắt ảnh và kiểu Từ tính dị hướng (AMR).
Cảm biến góc lái loại AMR
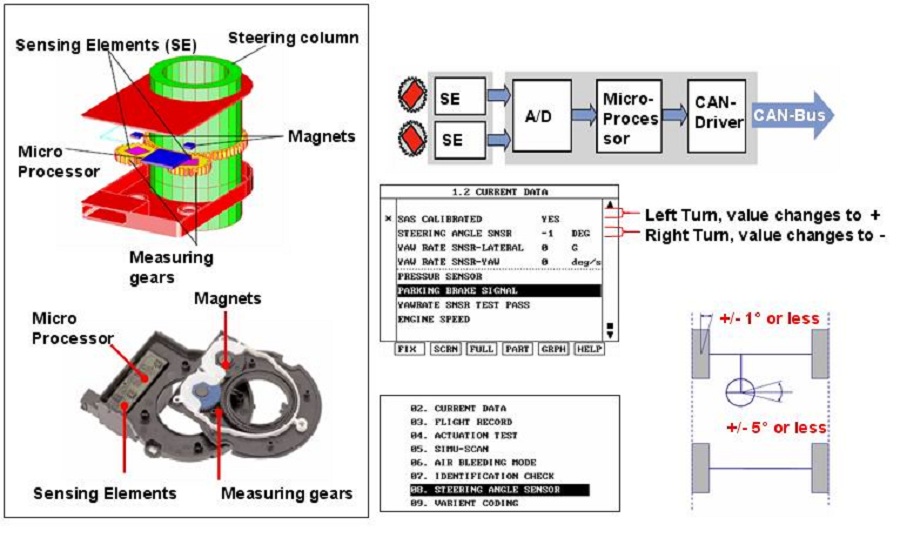
Nguyên tắc đo của loại điện trở từ đẳng hướng (AMR)
AMR -Steering Angle Sensor được phát triển để sử dụng trong hệ thống kiểm soát động lực học của xe (ESP). Góc lái được đưa ra dưới dạng giá trị tuyệt đối do phạm vi góc hoàn chỉnh (phạm vi quay) của cột lái. Điểm đặc biệt của cảm biến này là nó đưa ra góc chính xác ngay sau khi bật nguồn điện mà không cần di chuyển vô lăng. Góc lái và vận tốc góc lái được cấp qua CAN-Bus. Trụ lái dẫn động hai bánh răng đo bằng bánh răng thanh răng. Các bánh răng đo có số lượng răng khác nhau và do đó thay đổi vị trí quay của chúng vào những thời điểm thay đổi. Các răng đo giữ nam châm. Các phần tử cảm biến thay đổi điện trở của chúng theo từ trường. Các giá trị đo tương tự được truyền tới bộ vi xử lý bằng bộ chuyển đổi A / D. Sau khi bẻ lái một vài vòng, cả hai bánh răng đo đều trở lại vị trí ban đầu. Nguyên tắc đo này cho phép bao quát phạm vi đo của một số vòng quay vô lăng mà không cần sử dụng bộ đếm vòng quay. Có tồn tại một quan hệ toán học giữa góc vô lăng và góc trên cả hai bánh răng đo. Với sự trợ giúp của một chức năng toán học, có thể xác định góc vô lăng tuyệt đối từ vị trí của các bánh răng đo. Ngoài ra, chức năng này cho phép sửa lỗi và kiểm tra tính hợp lý của các tín hiệu riêng lẻ.
Dữ liệu hiện tại
Có thể kiểm tra đầu ra của Cảm biến góc lái bằng HI-SCAN PRO.
Hiệu chuẩn cảm biến góc lái loại AMR
Khi cảm biến vô lăng đã được thay thế, cảm biến mới phải được hiệu chỉnh.
Điều này cũng áp dụng nếu công việc sửa chữa đã được thực hiện trên tay lái, hoặc Bộ cảm biến đã được tháo ra.
Quy trình
– Kiểm tra xem bánh lái và bánh trước có theo hướng thẳng về phía trước hay không.
– Dung sai tối đa cho phép là +/- 5 °
– Bật lại Đánh lửa BẬT – TẮT – BẬT
– Kết nối HI-SCAN PRO
– Chọn cảm biến góc lái
Ghi chú:
Hiệu chuẩn được lưu trữ trong Vi mạch của cảm biến góc lái
Hiệu ứng khi cảm biến không được hiệu chỉnh
Cảm biến khử hiệu chuẩn được nhận dạng ngay sau khi bật đánh lửa, đèn cảnh báo ESP sáng (lệch hơn 15 °) và mã lỗi được đăng ký trong CU. Tuy nhiên, nếu cảm biến đã được hiệu chuẩn trước đó được lắp đặt và hiệu chuẩn không được thực hiện, đầu ra 0 có thể sẽ không tương ứng với vị trí thẳng phía trước. Miễn là độ lệch không vượt quá ngưỡng 15 °, hệ thống sẽ cố gắng thích ứng với điều kiện đó bằng cách sử dụng điều chỉnh dài hạn của nó.
Ví dụ: Lái xe 6 km với vô lăng điều chỉnh theo hướng thẳng sẽ làm giảm độ lệch khoảng 50%. CU đang giám sát các cảm biến tốc độ bánh xe để phát hiện chuyển động thẳng của xe.
Trong trường hợp Cảm biến góc lái không được hiệu chỉnh, đầu ra của Cảm biến góc lái hiển thị trong Dữ liệu hiện tại sẽ được đặt thành 0 và sẽ không thay đổi khi Vô lăng quay.
Ngoài ra, một DTC được thiết lập.
Kiểu ngắt ảnh
Cảm biến lái sử dụng đèn LED và bóng bán dẫn quang. Cảm biến A (ST1) và Cảm biến B (ST2) được lắp đặt tại cột lái. Một tấm khe được lắp giữa bóng bán dẫn quang và đèn LED. Tấm khe có 45 lỗ và nó quay khi vô lăng quay. Bóng bán dẫn quang hoạt động phụ thuộc vào ánh sáng sẽ đi qua các lỗ của tấm khe.
Cảm biến áp suất

Cảm biến áp suất phát hiện áp suất trong Xi lanh chính (MC). Thông tin Cảm biến được sử dụng để nhận biết ý định của người lái xe (ví dụ: phanh trong khi đang tiến hành can thiệp ESP). Ngoài ra, tín hiệu áp suất được sử dụng cho Điều khiển hỗ trợ phanh thủy lực (TEVES MK25 / BOSCH ESP8).
Nguyên tắc và chức năng đo:
Cảm biến bao gồm hai đĩa gốm, một đĩa đứng yên và đĩa kia có thể di chuyển được. Khoảng cách giữa các đĩa này thay đổi khi có áp lực
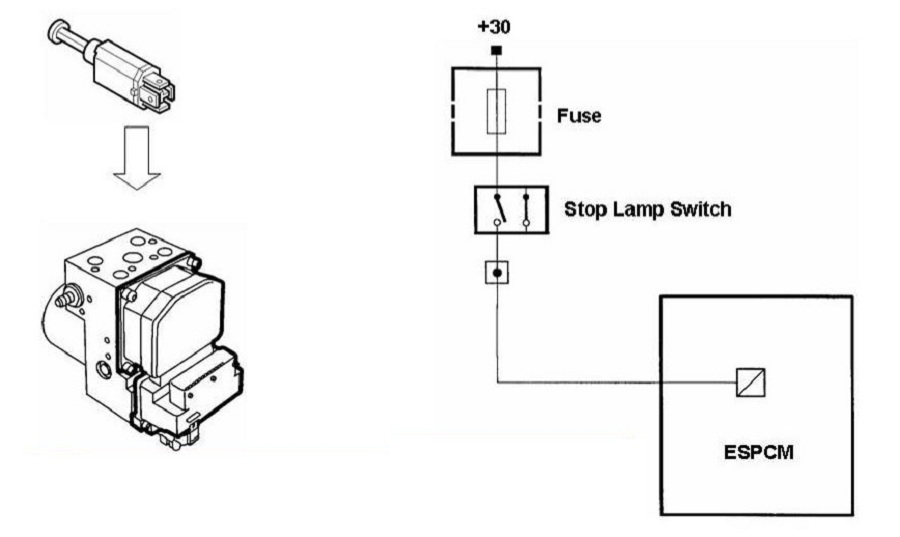
Tín hiệu công tắc đèn dừng
Khi nhấn bàn đạp phanh, dòng điện được đưa qua công tắc đèn phanh đến mô-đun điều khiển. Cần có Tín hiệu Công tắc Phanh để theo dõi Cảm biến Áp suất. Thông thường, Cảm biến áp suất sẽ nhận biết sự gia tăng áp suất khi đạp phanh (Trạng thái công tắc phanh BẬT). Có thể kiểm tra đầu ra Công tắc phanh bằng HI-SCAN PRO.
Công tắc ESP và đèn cảnh báo
Chức năng ESP / TCS có thể được BẬT / TẮT bằng một công tắc có lò xo trên bảng điều khiển. Tắt chức năng ESP sẽ làm cho đèn ESP OFF trên thiết bị chính sáng lên. Hệ thống thường hoạt động sau mỗi lần khởi động mới và chỉ ngừng hoạt động khi kích hoạt công tắc ESP. Công tắc được kết nối với mô-đun điều khiển ESP và khối nối khoang hành khách. Khối tiếp giáp khoang hành khách cấp nguồn B + (30) và khi nhấn nút, mạch được nối đất và chức năng ESP sẽ hoạt động hoặc ngắt tùy thuộc vào trạng thái hiện tại.
Đèn cảnh báo ESP
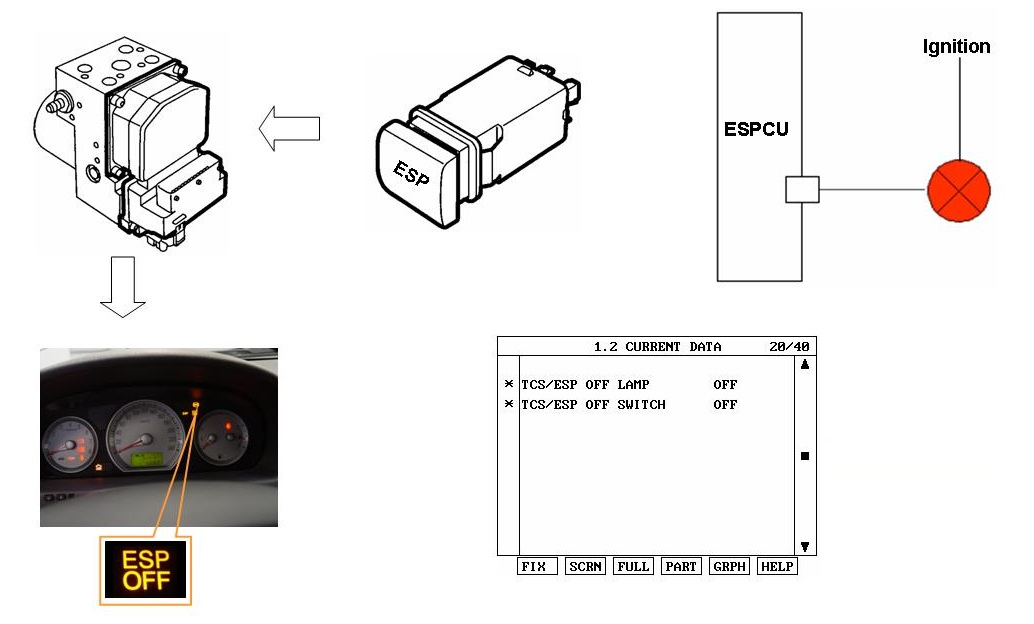
Đèn Cảnh báo ESP-TẮT cũng sẽ được bật nếu lỗi được phát hiện bởi ESPCM trong mạch điều khiển ESP hoặc TCS.
Điều khiển đèn cảnh báo TẮT ESP / TCS:
Đèn Cảnh báo ESP / TCS cho biết trạng thái tự kiểm tra và lỗi của hệ thống ESP / TCS. Đèn cảnh báo ESP / TCS được bật trong các điều kiện sau:
– Trong giai đoạn khởi tạo sau IGN. BẬT (liên tục 3 giây)
– Trong trường hợp bị lỗi chức năng ESP / TCS bị ức chế
– Khi chức năng ESP / TCS bị tắt bởi công tắc TCS
– Trong chế độ chẩn đoán
Hoạt động của đèn ESP
Đèn vận hành ESP / TCS cho biết trạng thái tự kiểm tra và hoạt động của hệ thống ESP / TCS. Đèn báo hoạt động của ESP sáng lên khi bộ đánh lửa được bật và tắt ngay sau khi kiểm tra xong các thiết bị ngoại vi. Trong một chu kỳ điều khiển ESP / TCS, đèn vận hành ESP nhấp nháy để cho người lái biết rằng hệ thống đang hoạt động và xe đang ở giới hạn khả năng vật lý của nó.
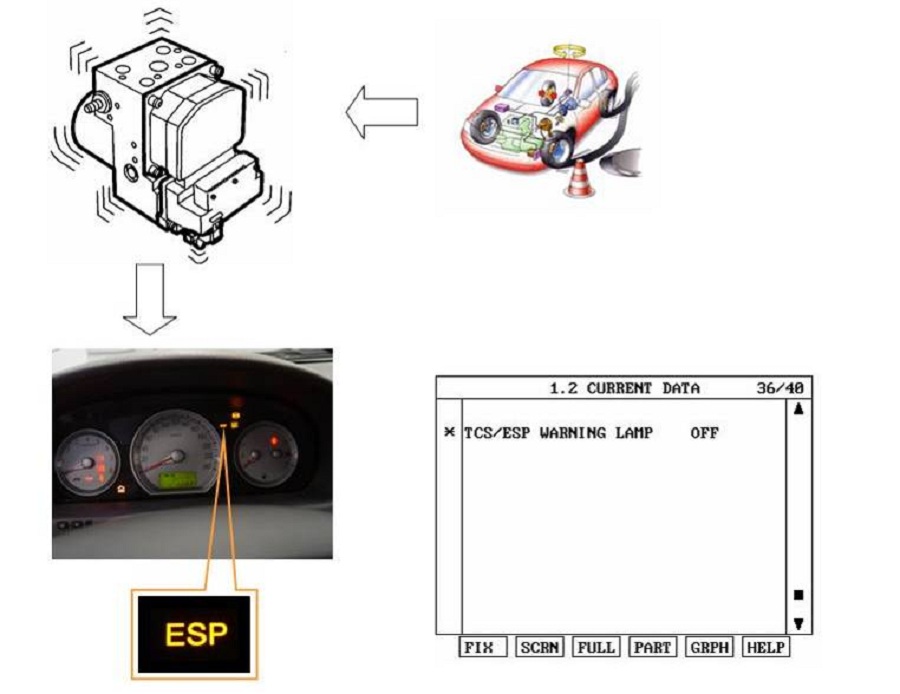
Đèn Chức năng ESP / TCS được bật trong các điều kiện sau:
– Trong giai đoạn khởi tạo sau IGN. BẬT (liên tục 3 giây)
– Khi điều khiển ESP / TCS đang diễn ra (Nhấp nháy 2Hz)
Van thủy lực
Bộ điều khiển điện tử thủy lực nằm bên trong khoang động cơ.
Hai van con thoi điện (ESV) được sử dụng thay cho van con thoi thủy lực.

Các van điện từ khác là:
2 Van kiểm soát lực kéo
4 van điện từ đầu vào
4 van điện từ đầu ra
Van điều khiển lực kéo:
Do chức năng ESP, vị trí của Van kiểm soát lực kéo đã được thay đổi. Điều này là cần thiết vì ESP có thể phanh tất cả các bánh xe riêng lẻ trong khi TCS chỉ hoạt động trên các bánh trước.
Tại sao lại thay đổi từ van con thoi thủy lực sang van con thoi điện?
Giống như van con thoi thủy lực của hệ thống TCS, Van con thoi điện nằm giữa phía hút của máy bơm và xi lanh chính. Khi cần có sự can thiệp của ESP, bơm ESP sẽ cung cấp dầu phanh dưới áp suất đến kẹp phanh đó để góp phần ổn định tình trạng lái xe. Nếu người lái nhấn phanh trong khi đang tiến hành can thiệp ESP, máy bơm sẽ không thể hút dầu phanh ra khỏi xi lanh chính, do van con thoi thủy lực được đóng trong điều kiện đó. Van con thoi điện cho phép bơm hút dầu phanh ra khỏi xi lanh chính ngay cả khi phanh được áp dụng.
Van con thoi thủy lực tự động mở khi áp suất giảm xuống dưới 1,5 bar. Van con thoi điện luôn đóng, bất kể áp suất được áp dụng là bao nhiêu. Nó chỉ có thể được mở bằng bộ điều khiển điện tử.
Mạch thủy lực
Van điện từ đầu vào (ISV)
Van này kết nối hoặc ngắt đường dẫn thủy lực giữa xi lanh chủ và xi lanh bánh xe. Van vẫn mở bình thường nhưng nó được đóng lại khi chế độ đổ và giữ bắt đầu trong quá trình ABS hoạt động. Mục đích của van một chiều là giúp dầu phanh quay trở lại từ xi lanh bánh xe về xi lanh chủ khi nhả bàn đạp phanh.
Van điện từ đầu ra (OSV)
Các van điện từ đầu ra thường đóng. Van được mở khi chế độ đổ bắt đầu giải phóng áp suất xi lanh bánh xe.
Van điện (ESV)
Van điện thường đóng. Khi ESP đang chạy, van sẽ được mở và dầu phanh được cung cấp cho các bộ phận của bơm.
Van điều khiển lực kéo (TCV)
Van điều khiển lực kéo thường mở và áp suất phanh từ xi lanh chính được áp dụng cho xi lanh bánh xe. Trong khi TCS hoặc ESP đang được tiến hành, TCV được đóng lại và áp suất được tạo ra được áp dụng cho các xi lanh bánh trước mà không quay trở lại xi lanh chính.
TCV bao gồm một van xả và một van một chiều. Khi áp suất quá mức được cung cấp từ động cơ, van xả được mở và áp suất được giảm bớt.
Cảm biến áp suất (P / U)
Cảm biến áp suất giám sát áp suất của đường phanh. Tín hiệu cảm biến này là dữ liệu cơ bản để điều khiển hỗ trợ phanh thủy lực. Ngoài ra, đầu vào cảm biến này được yêu cầu khi ESP đang diễn ra.
Thí dụ:
Thông thường, khi đang tiến hành ESP, áp suất thủy lực được tạo ra từ máy bơm. Để cung cấp chất lỏng thủy lực cho máy bơm, van điện được mở. Nếu người lái đạp phanh trong khi ESP đang chạy, ESPCU cần biết về sự thay đổi điều kiện áp suất để thay đổi tần số đóng / mở của Van điện.
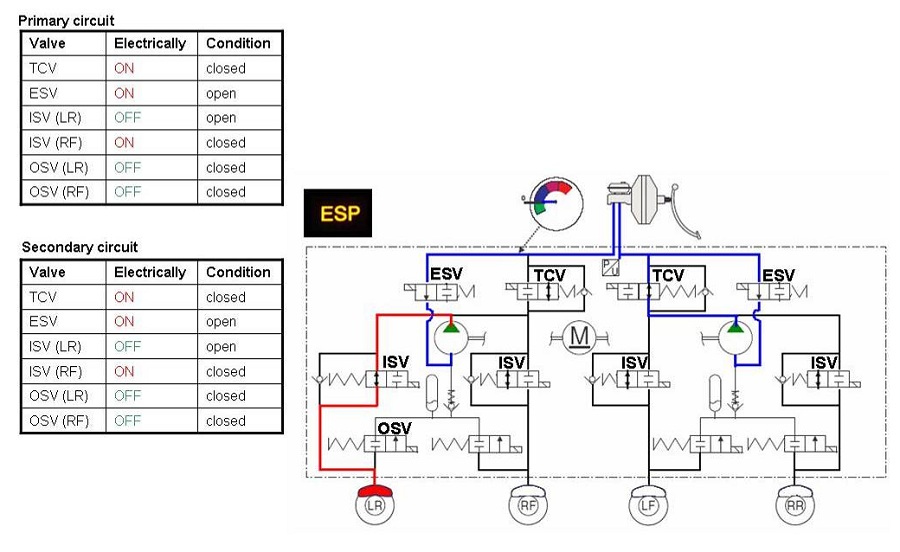
Kích hoạt hệ thống cân bằng điện tử ESC/ESP/VSC/DSC/VSA
Ở vị trí này, (các) Van điện từ đầu vào (ISV) của (các) bánh xe thích hợp được / được dẫn động theo chu kỳ xung. Các ISV còn lại được bật (đóng) bằng điện. Van điều khiển lực kéo của mạch phanh gần như đóng (điều khiển PWM). Van điều khiển đầu ra (OCV) vẫn đóng. Van điện (ESV) được mở để cho phép bơm hút dầu phanh ra khỏi xi lanh chính. Chất lỏng có áp suất đi qua Van điện từ đầu vào bên trái phía sau (ISV) dẫn động xung tới xi lanh phanh bánh xe. Các van điện từ đầu vào của các xi lanh phanh còn lại vẫn đóng. Như bạn có thể thấy trên hình vẽ, ESV và TCV của mạch phanh thứ hai cũng ở vị trí mở. Điều này được thực hiện để ngăn chặn áp suất quá mức tích tụ trong mạch. Máy bơm về cơ bản bơm dầu phanh qua các đường ống mà không tạo ra áp suất.



