Hệ thống dẫn động 2 cầu 4WD trên xe ô tô là gì ?
Hệ thống dẫn động 2 cầu 4WD trên xe ô tô là cụm gồm nhiều chi tiết làm nhiệm vụ thay đổi mô men xoắn, thay đổi kiểu truyền động từ hộp số đến bánh xe. Ngày nay hệ thống dẫn động 2 cầu 4WD trên xe ô tô vô cùng hiện đại có nhiều chế độ để bạn lựa chọn giống như hộp số tự động có cấp, bạn có thể sử dụng chế độ cơ là chuyển cầu bằng cần số phụ hoặc để chế độ tự động chuyển cầu tùy theo điều kiện của đường xá (đây là tính năng vô cùng thông minh)
Tác dụng của hệ thống dẫn động 2 cầu 4WD
Tác dụng chính của việc sử dụng hệ thống 4WD là để cải thiện lực kéo tổng thể của xe.

Để dễ hiểu, chúng tôi định nghĩa lực kéo là lượng lực truyền động tối đa mà lốp có thể tác dụng lên mặt đất. Lợi ích chính của hệ dẫn động bốn bánh là khả năng tăng gấp đôi lực dọc mà lốp xe có thể tác dụng lên mặt đất. Điều này giúp ích trong nhiều tình huống, chẳng hạn như đường có độ ma sát thấp (ví dụ: đường có tuyết phủ). Trong ví dụ ở bên phải, một con đường có bề mặt trơn trượt một phần được đưa ra. Trong trường hợp xe 2WD, mô-men xoắn cần thiết để di chuyển xe cao hơn lực kéo hiện có. Kết quả là các bánh xe bắt đầu quay và xe bị kẹt. Xe 4WD tại cùng một điểm sẽ truyền nhiều mô-men xoắn hơn đến bánh sau trên phần không trơn trượt, do đó mô-men xoắn tác động lên bánh trước và bánh sau nằm dưới lực kéo có sẵn: xe sẽ chuyển động về phía trước. (mẫu chung đơn giản: điều kiện chính xác của việc truyền mô-men xoắn phụ thuộc vào cách bố trí hệ thống thực tế). Các yếu tố sau đây ảnh hưởng đến độ bám đường nói chung: trọng lượng của lốp – Càng nhiều trọng lượng tác dụng lên lốp thì khả năng bám đường càng nhiều.
Hệ số ma sát liên hệ giữa lực ma sát giữa hai bề mặt với lực giữ hai bề mặt với nhau: nó là một hàm của loại lốp trên xe và loại bề mặt mà xe đang chạy. Quan trọng: hệ số ma sát đối với tiếp xúc tĩnh cao hơn tiếp xúc động (trượt bánh xe), do đó tiếp xúc tĩnh cung cấp lực kéo tốt hơn tiếp xúc động. Trượt bánh xe: xảy ra khi lực tác dụng lên một lốp xe vượt quá lực kéo của lốp xe đó. Trong trường hợp này, lực kéo có thể bị giảm, như đã giải thích ở trên. Việc truyền trọng lượng do xe tăng tốc và vào cua ảnh hưởng đến khả năng bám đường của lốp, vì trọng lượng tác động lên từng lốp thay đổi.
FN = trọng lượng lên lốp, FR = lực kéo tối đa, FA = lực truyền động, MR = mômen truyền động lên lốp
Tác dụng thay đổi tải trọng và thay đổi các kiểu hệ thống dẫn động xe 2 cầu 4WD khác nhau
Việc truyền trọng lượng làm thay đổi lực kéo có sẵn ở các bánh xe vì nó làm giảm / tăng trọng lượng tác động lên vỏ xe. Chuyển trọng lượng xảy ra theo hướng dọc do xe giảm tốc và tăng tốc và theo hướng ngang do vào cua. Khi ô tô vào cua với vận tốc lớn, trọng lượng của ô tô được truyền từ bánh trong ra bánh ngoài. Khi nó tăng tốc, trọng lượng chuyển sang bánh sau. Tốc độ thay đổi tỷ lệ thuận với chiều cao của trọng tâm (CG), gia tốc bên (tính bằng g) và tỷ lệ nghịch với chiều rộng đường đua.
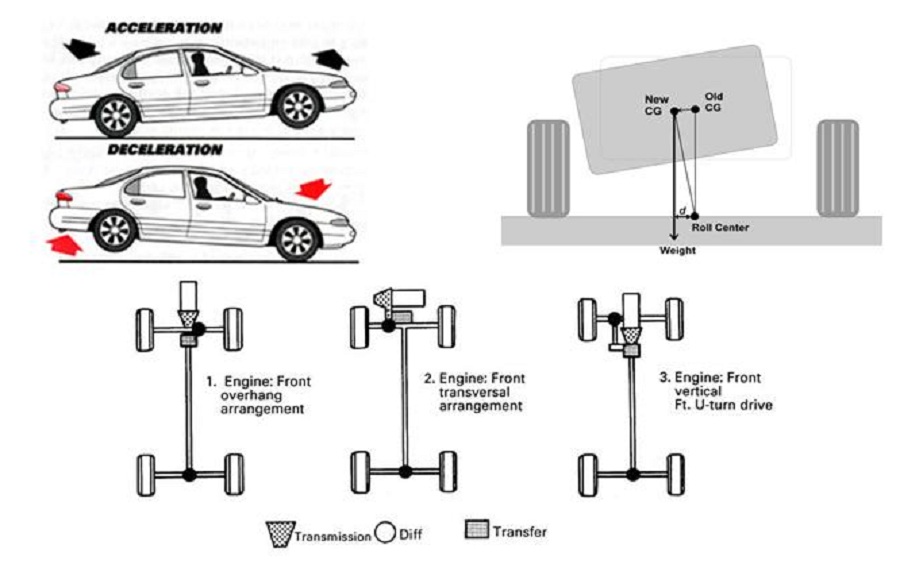
Trọng lượng truyền = (Gia tốc bên x Trọng lượng x Chiều cao của CG) / Chiều rộng đường ray. Ví dụ, một chiếc xe đang vào cua với vận tốc 0,85 g. Giả sử chiều rộng đường ray của nó là 1600 mm, chiều cao của CG là 500 mm và nó nặng 1250 kg, thì chúng ta có thể tính toán trọng lượng chuyển là 332 kg. Một chiếc ô tô (chiều rộng rãnh 1600 mm, chiều cao CG 500 mm, trọng lượng 1250 kg), lăn 10 độ khi vào cua, d sẽ là 500 x sin10 ° = 86,8 mm. Khi đó tải trọng của bánh xe bên ngoài có thể được tính là: Trọng lượng x [(Chiều rộng rãnh / 2) + độ khi vào cua] / chiều rộng rãnh (1250 x (800 + 86.8)) / 1600 = 693 kg Trong khi bánh xe bên trong mất 557 kg (1250kg – 693kg). Vậy có khối lượng 68 kg chuyển. Lượng trọng lượng truyền không chỉ phụ thuộc vào trọng lượng xe hoặc lực G mà còn phụ thuộc vào cấu tạo chung của xe, chẳng hạn như cách bố trí tàu điện, v.v. Hình ảnh cho thấy một số cách bố trí 4WD điển hình cho xe Hyundai. Ngoài ra còn có những người khác như được chỉ ra bên dưới.
Các loại vi sai và cách bố trí trên hệ thống dẫn động 2 cầu
Hệ dẫn động bốn bánh toàn thời gian thường được trang bị bộ vi sai trung tâm (hoặc trong một số trường hợp hiếm hoi có khớp nối nhớt thay thế), và do đó có thể sử dụng trên đường khô ở chế độ 4WD mà không gặp bất kỳ vấn đề gì. Điều này cũng có hiệu lực đối với hệ dẫn động tất cả các bánh hoặc xe bốn bánh vĩnh viễn. Sự khác biệt là 4WD không thể được tắt. Trong trường hợp Lái xe Tất cả các bánh, không có phần cao và thấp trong chuyển đổi, vì xe được thiết kế chỉ để sử dụng trên đường. Xin lưu ý rằng các thuật ngữ nêu trên có thể được sử dụng khác nhau, ví dụ tùy thuộc vào nhà sản xuất. Hệ thống điều khiển điện tử gần đây được phát triển, sử dụng 4WD tự động và chỉ trong trường hợp được yêu cầu, ví dụ cho hệ thống như vậy là ITM của hoặc Sorento được trang bị TOD.
Hiện tượng góc hẹp / xu hướng khóa phanh
Những xe không được trang bị vi sai trung tâm mà chỉ có vi sai trước sau chỉ nên sử dụng hệ dẫn động 4 bánh trong những điều kiện cụ thể như đường trơn trượt. Do đó hệ thống như vậy được gọi là hệ thống 4WD bán thời gian. Lái loại xe này với hệ dẫn động 4 bánh trên đường trải nhựa thử sẽ gây ra ứng suất cao cho lốp và đường truyền động. Điều này có thể dễ dàng nhận ra khi vào cua, vì người lái sẽ nhận thấy khung xe bị cuộn lại và khả năng chống lăn cao. Điều này là do bánh sau và bánh trước di chuyển một khoảng cách khác nhau trong quá trình vào cua, như được chỉ ra trong hình. Cách duy nhất để bù đắp điều này mà không có vi sai trung tâm là lốp bị trượt (hơi). Do hiệu quả ma sát cao của đường thử, cần phải có một lực lớn trước khi lốp bắt đầu trượt, do đó ứng suất trên đường truyền động cao. Một chút tương tự về lý do là việc lắp đặt G-Sensor trên một số xe 4WD. Khi bánh trước và bánh sau được liên kết cơ học và ảnh hưởng lẫn nhau, xu hướng khóa một bánh sẽ giảm xuống. Nhưng xu hướng khóa tất cả các bánh xe lại với nhau được tăng lên so với một chiếc xe thông thường. Điều này có thể xảy ra nhất trong hai điều kiện khác nhau: hoặc lực phanh rất mạnh được áp dụng trong điều kiện đường bình thường hoặc lực phanh tương đối thấp được áp dụng trong điều kiện đường trơn trượt, dẫn đến giảm tốc độ khác nhau. Sự giảm tốc này được đo bằng cảm biến G, để bộ phận điều khiển có thể áp dụng chiến lược phanh tốt nhất cho tình hình thực tế. Điều này có nghĩa là cảm biến G được sử dụng để điều khiển ABS tốt hơn và không được sử dụng trực tiếp cho điều khiển 4WD. Để biết thông tin liên quan, vui lòng tham khảo phần ABS.
Hệ thống khóa vi sai trên hệ thống dẫn động 2 cầu 4WD
Một hệ thống 4WD thông thường, đơn giản với bộ vi sai tiêu chuẩn (mở) vẫn có thể mất lực kéo tương đối dễ dàng trong một số điều kiện nhất định. Điều này được chỉ ra bởi mẫu ở phía bên phải. Một bộ vi sai mở chỉ có thể gửi một lượng mô-men xoắn đến lốp mà không làm cho lốp có độ bám đường kém nhất bị trượt. Do đó, mô-men xoắn có thể truyền có thể không đủ để đưa xe ra khỏi tình trạng bị kẹt nếu cả hai trục đều nằm trên bề mặt trơn trượt (như được chỉ ra trong hình), vì lốp trên đó sẽ bắt đầu trượt. Trong tình huống được hiển thị, điều này có nghĩa là cả hai bánh bên phải sẽ quay và xe sẽ không chuyển động.
Vì điều này không được mong muốn cho việc sử dụng ngoài đường thực sự, nên có một số cách để cải thiện một hệ thống như thế này. Thay thế (các) bộ vi sai thông thường bằng (các) bộ vi sai hạn chế trượt là một trong những cách phổ biến nhất – điều này đảm bảo rằng các bánh xe trên mặt đất tốt hơn có thể áp dụng một số mô-men xoắn bất kể điều gì xảy ra với lốp xe (trượt) kia . Thiết bị khóa có thể được phân loại thành hai loại: thiết bị khóa một phần, thường được gọi là bộ vi sai trượt giới hạn và thiết bị khóa hoàn toàn: khóa vi sai. Bộ vi sai hạn chế trượt thực hiện một chức năng bổ sung so với bộ vi sai tiêu chuẩn, đó là, nó cung cấp thêm lực truyền động đến bánh xe với lực kéo khi một bánh bắt đầu quay. Có các cấu tạo khác nhau của thiết bị này có sẵn, như được chỉ ra trong hình.
Ví dụ loại EATON LSD với đĩa ma sát được tải sẵn hoặc ví dụ như khớp nối nhớt. Thiết bị LSD có thể được phân loại thành loại cảm biến mô-men xoắn hoặc loại cảm biến tốc độ. Để giải thích thêm, hãy tham khảo phần hộp số tay. Một tùy chọn khác là khóa vi sai đầy đủ. Loại vi sai này có các bộ phận giống như vi sai hở, nhưng có thêm cơ cấu cơ khí, điện, khí nén hoặc thủy lực để khóa các bánh răng ra lại với nhau. Cơ chế này thường được kích hoạt bằng tay, và khi được kích hoạt, cả hai bánh xe sẽ quay cùng tốc độ. Do đó, ngay cả khi một bánh lên khỏi mặt đất, bánh kia vẫn có thể tác dụng mô-men xoắn lên mặt đất. Trong trường hợp bánh xe trên mặt đất bắt đầu quay thì cả hai bánh xe sẽ quay cùng tốc độ, và một số lực kéo có sẵn (nhưng có thể không đủ để di chuyển xe). Bộ vi sai khóa hoàn toàn rất hữu ích cho các loại xe địa hình nghiêm trọng. Lưu ý: Gần đây có những hệ thống sử dụng hệ thống phanh để đạt được lực kéo trong trường hợp này, bằng cách phanh (các) bánh xe bị trượt, mô-men xoắn được truyền sang (các) bánh kia.
Khớp nối nhớt
Cho phép có một cái nhìn sâu hơn về hoạt động của một khớp nối nhớt. Khớp nối nhớt thường thấy ở các loại xe dẫn động 4 bánh. Nó thường được sử dụng để liên kết bánh sau với bánh trước để khi một bộ bánh bắt đầu trượt, mô-men xoắn sẽ được truyền sang bộ kia. Do đó, như một mẫu, chúng ta hãy xem xét khớp nối nhớt giữa trục trước và trục sau. Khớp nối nhớt có hai bộ đĩa bên trong một vỏ kín chứa đầy chất lỏng đặc (dầu silicon). Một bộ đĩa được kết nối với trục đầu ra phía trước, bộ đĩa khác được kết nối với trục đầu ra phía sau. Trong điều kiện lái xe bình thường, cả bộ đĩa và dầu nhớt quay cùng tốc độ với nhau và không có sự chênh lệch tốc độ nào xảy ra ở các trục.
Khi một bộ bánh xe bắt đầu quay nhanh hơn, chẳng hạn như vì nó bị trượt, bộ đĩa kết nối với các bánh xe đó sẽ quay nhanh hơn các bộ khác. Chất lỏng nhớt giữa các đĩa cố gắng bắt kịp với các đĩa nhanh hơn, kéo theo các đĩa chậm hơn. Điều này truyền mô-men xoắn đến các bánh xe chuyển động chậm hơn: các bánh xe không bị trượt. Tốc độ của các tấm tương đối với nhau càng cao thì mô men xoắn mà khớp nối nhớt chuyển từ bộ này sang bộ kia càng nhiều. Khi ô tô đang quay đầu, sự chênh lệch về tốc độ giữa các bánh xe không lớn. Do đó khớp nối không gây trở ngại cho các vòng quay vì lượng mômen truyền trong một vòng quay là rất nhỏ.
Tuy nhiên, điều này cũng làm nổi bật một nhược điểm của khớp nối nhớt: Không có sự truyền mô-men xoắn nào xảy ra cho đến khi một bánh xe thực sự bắt đầu trượt với một tốc độ nhất định. Đây được gọi là độ nhạy tốc độ. Vì khớp nối nhớt nhạy cảm với tốc độ nhưng không nhạy với mô-men xoắn, nó có thể không giúp ích được gì cho bạn nếu bạn bị kẹt trong điều kiện bánh xe quay chậm nhưng với mô-men xoắn tương đối cao (ví dụ như địa hình, bùn nhiều). có thể xảy ra nếu tải trên khớp nối nhớt cao do trục (bánh xe) quay liên tục. Nếu tình trạng “trượt” của khớp nối nhớt tiếp tục trong một thời gian nhất định, khớp nối nhớt bắt đầu nóng lên. Điều này sẽ làm tăng áp suất bên trong, để cuối cùng các tấm tiếp xúc trực tiếp với nhau. Điều này làm tăng hệ số ma sát, dẫn đến mômen truyền tăng đột ngột, có thể giúp xe thoát khỏi tình trạng kẹt cứng. Hiệu ứng này được gọi là hiệu ứng HUMP.
Hệ thống ITM – quản lý mô men xoắn của hệ thống dẫn động 4WD
Quản lý mô-men xoắn tương tác (hoặc thông minh) là thương hiệu của Borg Warner và có sẵn cho Sportage và cho đến nay. Hệ thống ITM cung cấp các đặc tính truyền mô-men xoắn hoàn toàn có thể kiểm soát được và việc kích hoạt và hủy kích hoạt hệ thống 4WD một cách tự động cực kỳ nhanh chóng. Hiệu suất và độ an toàn tối đa đạt được trong mọi điều kiện lái xe. Nó cung cấp khả năng bám đường của xe được tăng cường bất cứ khi nào được yêu cầu và cải thiện tính năng động trong quá trình tăng và giảm tốc. Vì hệ dẫn động 4 bánh chỉ được sử dụng khi cần thiết, nên sẽ không có gió khi vào cua hoặc đỗ xe chật hẹp. Hệ dẫn động 4WD bao gồm ít bộ phận hơn các hệ thống khác, dẫn đến giảm trọng lượng và giảm mức tiêu thụ nhiên liệu. Khả năng kiểm soát mô-men xoắn biến thiên cho phép chia sẻ từ 100% dẫn động bánh trước lên đến 50:50 chia sẻ giữa cầu trước và cầu sau. Khớp nối liên lạc trực tuyến với các hệ thống an toàn khác (ví dụ: ABS) để cải thiện độ an toàn của xe. Ví dụ: trong khi kích hoạt ABS, 4WD được chuyển sang để cho phép điều khiển ABS độc lập các trục để có độ ổn định tốt hơn.
Hệ thống ITM dựa trên hệ thống truyền động bánh trước
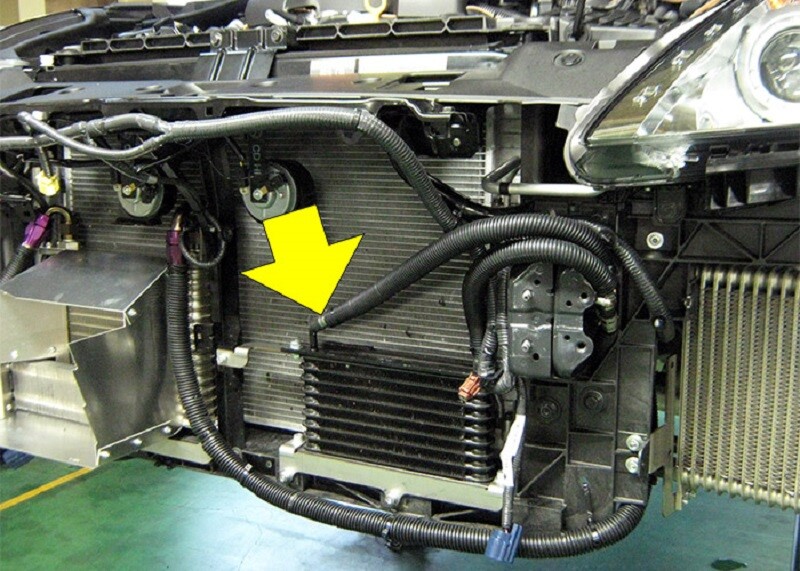
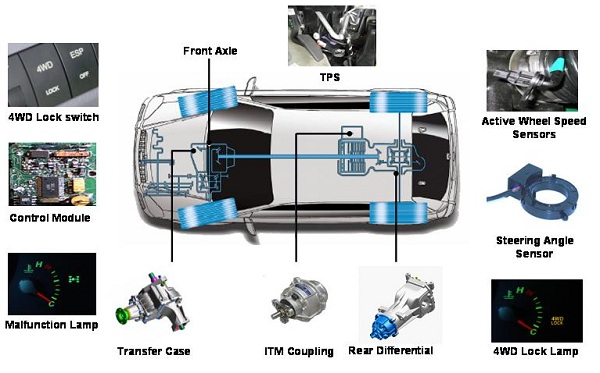
Hệ thống ITM bao gồm các bộ phận chính sau: Hộp chuyển động, trục các đăng, bộ khớp nối ITM điều khiển điện tử và bộ vi sai cầu sau ở mặt cơ khí và mô-đun điều khiển, công tắc khóa 4WD, bướm ga cảm biến vị trí, cảm biến tốc độ bánh xe, cảm biến góc lái, đèn khóa 4WD và đèn báo sự cố bên điện. Khi khóa 4WD được kích hoạt (chỉ có thể ở một tốc độ nhất định), khớp nối được kích hoạt hoàn toàn và xe ở chế độ 4WD (50:50), được chỉ báo bằng đèn khóa 4WD. Vì không có vi sai trung tâm, góc hẹp sẽ xảy ra trong điều kiện này. Ở chế độ tiêu chuẩn (khóa tắt), sự phân bổ mô-men xoắn giữa cầu trước và cầu sau được điều khiển dựa trên các yếu tố đầu vào từ cảm biến vị trí bướm ga, cảm biến tốc độ bánh xe và cảm biến góc lái. Vì điều kiện 4WD chỉ được sử dụng khi được yêu cầu (về cơ bản: phát hiện trượt bánh) nên mức tiêu thụ nhiên liệu giảm so với xe dẫn động tất cả các bánh tiêu chuẩn. Trong trường hợp có sự cố trong hệ thống, trình điều khiển sẽ được thông báo bằng đèn báo sự cố.
Hệ thống phân bố tải trọng lên từng bánh của hệ thống dẫn động 4WD
Trường hợp chuyển động của KM bao gồm trục đầu vào được dẫn động thông qua bộ vi sai phía trước bằng phương tiện các trục quay và hộp số để cung cấp mô-men xoắn cho trục các đăng. Trục đầu vào của hộp số được làm rỗng, để trục truyền động của bánh trước bên phải có thể đi qua nó và kết nối với bộ vi sai phía trước. Bộ truyền bánh răng được sử dụng để thay đổi tốc độ trục đầu vào thành giá trị tốc độ cần thiết ở trục sau và để thay đổi hướng của đầu ra đối với trục các đăng. Bộ truyền bánh răng bao gồm hai bánh răng thông thường, một bánh răng vòng và một bánh răng côn. Với khớp nối ITM chủ động, sức mạnh được truyền qua hộp số, trục các đăng, khớp nối ITM được kích hoạt tới vi sai cầu sau và cuối cùng là bánh sau. Trong trường hợp khớp nối ITM không được kích hoạt, các bánh răng trong chuyển động và trục các đăng quay tự do và chỉ có bánh trước được dẫn động.
Bộ ghép nối ITM
Trái tim của hệ thống là khớp nối ITM (bên cạnh bộ điều khiển điện tử). Các thành phần chính của bộ ghép nối là vỏ và ổ trục, cuộn dây điện từ, ly hợp sơ cấp, cam ứng dụng, bi thép và ly hợp thứ cấp. Hai ly hợp đều là loại ly hợp nhiều đĩa. Ly hợp sơ cấp được sử dụng để tạo áp lực lên ly hợp thứ cấp thông qua cam ứng dụng. Để biết hoạt động chi tiết, hãy tham khảo trang tiếp theo.
Hoạt động khớp nối:
Trục đầu vào của khớp nối ITM được kết nối với vỏ ly hợp. Bằng cách cung cấp năng lượng cho ly hợp điện từ, phần ứng được kéo về phía ly hợp từ. Phần ứng ép các đĩa ly hợp sơ cấp (hoặc điều biến) lên vỏ ly hợp, do đó kết nối ly hợp sơ cấp với trục đầu vào. Chênh lệch tốc độ giữa cam cơ sở và cam lắp được tạo ra do đó làm cho các viên bi thép giữa cam cơ sở và cam di chuyển lên đường dốc của viên bi. Do đó, cam ứng dụng được đẩy về phía gói ly hợp thứ cấp, lúc này kết nối vỏ ly hợp (trục đầu vào) với trục đầu ra. Lực tác dụng lên ly hợp thứ cấp phụ thuộc vào lượng áp suất của các viên bi thép. Lượng áp lực từ các viên bi thép phụ thuộc vào lượng chúng di chuyển lên trên đường dốc, cuối cùng phụ thuộc vào cường độ trường của ly hợp từ. Cường độ trường của ly hợp từ được điều khiển bởi ITMCM thông qua điều khiển nhiệm vụ
Tùy thuộc vào mức độ trượt bánh xe được phát hiện trên bánh trước, ITMCM sẽ áp dụng nhiệm vụ cần thiết để đáp ứng áp suất mục tiêu do cơ cấu dốc bóng tạo ra. Bằng cách này, việc điều khiển ly hợp thứ cấp và mô-men xoắn cực đại đến trục sau được thực hiện nhờ nguồn cung cấp năng lượng thay đổi cho cuộn dây tiếp điện và có thể đạt bất kỳ giá trị nào trong khoảng từ 100 phía trước 0% phía sau đến tỷ lệ 50:50 giữa phía trước và phía sau.
Hệ thống kiểm soát ITMCM:
ITMCM thay đổi dòng điện áp dụng cho EMC để đạt được sự phân bổ mô-men xoắn thích hợp cho bánh sau. Dạng sóng phía trên cho thấy điều kiện trong đó một lượng mô-men xoắn được chuyển tiếp đến bánh sau, dạng phía dưới cho thấy sự phân bổ mô-men xoắn 50: 50. Ngoài kiểm soát liên quan đến độ mở bướm ga và trượt bánh xe, các yếu tố kiểm soát khác cũng tồn tại như được chỉ ra trong biểu đồ. Ví dụ, ngay cả khi khóa 4WD được kích hoạt, nhiệm vụ sẽ được giảm xuống trong trường hợp ABS hoạt động. Có ba chế độ lái cơ bản: Chế độ lái bình thường ở tốc độ không đổi: trạng thái gần như 2WD. Chế độ lái điều khiển tương tác 4WD, phân phối mô-men xoắn biến thiên lên đến tỷ lệ 50% – 50% bằng cách kiểm soát dòng điện đầu ra cung cấp cho Ly hợp điện từ. Sự phân bổ mô-men xoắn (trạng thái 4WD) thay đổi theo trạng thái lái, ví dụ khởi động đột ngột, bật trên bề mặt ma sát thấp 4WD Khóa: Dẫn động 4WD Phân bổ mô-men xoắn 50: 50.
ITMCM giám sát định kỳ đầu vào và đầu ra của nó. Nếu một lỗi được phát hiện, ITM sẽ bị vô hiệu hóa và mã lỗi sẽ được lưu trong bộ nhớ ECU. Đèn chẩn đoán nhấp nháy với tốc độ 2 HZ để thông báo cho người lái xe về sự cố hệ thống. Lần đầu tiên lỗi được phát hiện, DTC được lưu trữ trong bộ nhớ không bay hơi của ECU và sẽ vẫn ở trong bộ nhớ cho đến khi máy kiểm tra chẩn đoán xóa nó. DTC sẽ không bị xóa bằng cách ngắt kết nối nguồn với ITMCM.
Hệ thống chuyển số điện tử (EST)
Hai hệ thống 4WD khác nhau được sử dụng trong xe ô tô: Hệ thống chuyển số điện tử (EST), đôi khi còn được gọi là Chuyển số khi di chuyển (SOTF) và hệ thống Mô-men xoắn theo yêu cầu (TOD), một số thời điểm được gọi là Truyền mô-men xoắn chủ động ATT. Cấu tạo chung của hai hệ thống này rất giống nhau về sự chuyển giao. Sự khác biệt chính là kích hoạt 4WD: trong EST, nó được thực hiện thông qua một phuộc chuyển số, kết nối đầu ra phía trước và phía sau. Trong trường hợp TOD, ly hợp nhiều đĩa sẽ thực hiện nhiệm vụ này. Hơn nữa, EST áp dụng cái gọi là Vi sai chạy tự do (FRRD), ngắt cầu trước ở chế độ 2WD để tiết kiệm nhiên liệu.
Trong trường hợp TOD không áp dụng hệ thống FRRD, chỉ sử dụng một vi sai thông thường. Điều này là do thực tế là 4WD được sử dụng theo yêu cầu, vì vậy cần phải có kết nối vĩnh viễn của trục trước. Cả hai hệ thống đều áp dụng phần THẤP để lái xe địa hình. Để đi vào đoạn đường thấp, xe phải dừng hoàn toàn, điều này áp dụng cho cả hai hệ thống: EST và TOD. Bơm dầu được sử dụng trong cả hai hệ thống, nhưng không có chức năng đặc biệt cho hệ thống. Máy bơm chỉ được sử dụng để bôi trơn các bộ phận bên trong.
Hệ thống chuyển cầu điện EST
EST: Electrical Shift Transfer là hệ thống dẫn động 4 bánh bán thời gian và tiêu chuẩn trên tất cả các mẫu xe và trang bị cho phép người lái “chuyển số nhanh” giữa các chế độ dẫn động hai và bốn bánh ở tốc độ lên đến 80 km / h. Đây là hệ thống kiểm soát đường dẫn động cho phép người lái chuyển đổi giữa 2WD và 4WD khi đang lái xe trên đường thẳng với tốc độ xe 80 km / h. Sử dụng tất cả các tùy chọn có sẵn của hệ thống điều khiển dòng truyền động này, khách hàng có thể chọn các chế độ trường hợp chuyển sau:
2 HI: Dẫn động hai bánh, số cao
4 HI: Dẫn động bốn bánh, hộp số cao
4 LO: Bánh răng thấp dẫn động bốn bánh
Hệ thống EST bao gồm các thành phần (chính) sau:
- Bộ điều khiển điện tử (ECU)
- Công tắc 4WD
- Đèn báo 4WD
- Hộp chuyển với bộ truyền động động cơ
- Vi sai phía trước với hệ thống FRRD (Vi sai chạy tự do)
- Động cơ bơm khí
Bộ điều khiển 4WD chịu trách nhiệm tham gia và ngắt chế độ dẫn động bốn bánh. Việc chuyển đổi giữa “4H” và “4L” phải được thực hiện thủ công bằng cách sử dụng công tắc 4WD.
Hệ thống kiểm soát EST
Tín hiệu đầu vào là công tắc chọn EST, nơi có thể chọn chế độ cần thiết. Tín hiệu AT N hoặc tín hiệu ly hợp để phát hiện tình trạng trung tính của bộ truyền trong trường hợp 4 L được chọn. Điều này là cần thiết để cho phép chuyển số thành 4 L. Cảm biến tốc độ để phát hiện tốc độ của xe, tín hiệu này được sử dụng để xác minh là có thể chuyển số (ví dụ: cho phép chuyển sang 4 L). Tín hiệu cảm biến vị trí động cơ để phát hiện vị trí thực tế của động cơ chuyển số (và do đó của bộ chuyển số. Tín hiệu này được yêu cầu để dừng động cơ chuyển số ở vị trí cần thiết để thực hiện chế độ đã chọn và cũng để phát hiện tình trạng chuyển số chưa hoàn thành Các tín hiệu đầu ra là đầu ra cho động cơ chuyển số, ly hợp điện từ, động cơ bơm không khí của hệ thống FRRD, các chỉ báo trong cụm và tới đầu nối chẩn đoán. Hệ thống điều khiển cho phép các chế độ sau:
Chế độ 2H
Chuyển sang chế độ 2 H có thể được thực hiện trong khi lái xe, điều này được gọi là: Shift On The Fly SOTF
Chế độ 4H
Chế độ tốc độ cao 4WD cũng có thể được kích hoạt khi xe đang lái, với xe
tốc độ lên đến 80km / h. Nếu quá trình chuyển số thành công, hệ thống ngắt kết nối trục trung tâm sẽ được vận hành để kết nối trục trước sao cho 4WD hoạt động và đèn cao 4WD sẽ được bật. Hoạt động của FRRD sẽ được giải thích chi tiết ở phần sau.
Chế độ 4L
Nên dừng xe (3km / h trở xuống) để chọn loại 4L này. Nếu sự thay đổi thành công, 4L đèn sẽ được bật.
Để tham gia và ngắt chế độ 4WD, bộ điều khiển phải thực hiện các tác vụ sau:
chuyển bánh răng đầu ra phía trước của hộp chuyển số (kết nối hoặc ngắt kết nối bánh răng với trục các đăng phía trước bằng động cơ điện) Trong điều kiện thời tiết lạnh hoặc tốc độ cao, việc lắp đặt hộp chuyển có thể khó khăn. Khi điều này được công nhận bởi
Bộ điều khiển 4WD, hệ thống sẽ thực hiện thêm hai lần thử để chuyển trường hợp chuyển. Nếu những lần thử lại này vẫn không thành công, bộ điều khiển 4WD sẽ thông báo cho người lái xe qua đèn báo. Trong trường hợp có lỗi, cả hai đèn cảnh báo sẽ vẫn BẬT và EST sẽ không hoạt động. Đèn cảnh báo sẽ TẮT sau khi sửa chữa thành công ở lần BẬT đánh lửa tiếp theo.
Chuyển động cơ
Trong cả hai trường hợp, EST / TOD một động cơ chuyển số được lắp đặt khi chuyển giao. Để cho phép dịch chuyển theo cả hai hướng, thiết bị điều khiển có thể chuyển đổi cực tính của các đầu nối nguồn điện, ngoài ra, động cơ chuyển số còn kết hợp một cảm biến vị trí được sử dụng để theo dõi tiến trình dịch chuyển và vị trí của động cơ. Về cơ bản nó bao gồm một đĩa tiếp xúc ở mặt sau của bánh xe con sâu của động cơ chuyển số và các thanh trượt để tiếp xúc với đĩa. Sự sắp xếp này cho phép ECU phát hiện vị trí của động cơ bằng tín hiệu điện áp trên các cực riêng lẻ. Dưới đây là biểu đồ về tình trạng đầu cuối theo vị trí động cơ.
Tình trạng cao hay thấp của mỗi dòng phụ thuộc vào vị trí của tấm tiếp xúc (vị trí động cơ). Sự trở lại thông thường chỉ được nối đất trong quá trình vận hành động cơ trong một khoảng thời gian ngắn (7 giây) để phát hiện sự thành công của một hoạt động thay đổi. Nếu việc chuyển số không thành công, đèn 4 H / 4 L được bật nếu xe được chuyển sang chế độ 4WD và đèn tắt trong trường hợp 2WD được chọn. Nếu quá trình thay đổi không thành công, quá trình thử lại được bắt đầu, nếu không thành công một lần nữa, mã sự cố sẽ được tạo và hệ thống bị tắt. Người lái xe sẽ được thông báo bằng đèn 4WD nhấp nháy. (Thông tin bổ sung: không thể kiểm tra tình trạng hệ thống FRRD bằng cảm biến). Xin lưu ý rằng các động cơ thay đổi cho hệ thống EST và hệ thống TOD là khác nhau và không thể thay thế cho nhau, ngay cả khi chúng trông giống nhau.
Xây dựng chuyển giao EST
Việc chuyển giao cho hệ thống EST. Có hai ngã ba được cài đặt. Cái ở bên phải là để kết nối và ngắt kết nối phần dẫn động 4WD, cái ở bên trái là để chuyển đổi giữa phần cao và thấp. Cả hai phuộc chuyển số đều được chuyển động bằng một động cơ điện phù hợp với tín hiệu từ bộ phận điều khiển. Động cơ kết hợp một cảm biến vị trí để phát hiện vị trí thực tế. Cuộn dây có thể được nhìn thấy ở phía bên phải được cung cấp năng lượng trong một thời gian ngắn trong quá trình thay đổi từ 2WD sang 4WD để hỗ trợ động cơ chuyển số để chuyển số an toàn và trơn tru. Khi phuộc được di chuyển sang phải, nó kết nối đĩa xích của xích răng với trục với trục sau để mô-men xoắn được phân chia 50: 50 giữa trục trước và trục sau. Nếu người lái cần đạt được mô-men xoắn cao hơn, anh ta có thể áp dụng bộ bánh răng hành tinh giảm tốc. Để tham gia, anh ta phải dừng xe và chọn vị trí 4L bằng công tắc. Sau đó, động cơ chuyển số sẽ di chuyển ngã ba HI LO và tham gia vào hành tinh, điều này làm giảm tốc độ, nhưng tăng mô-men xoắn lên 2,48. Sử dụng tất cả các tùy chọn có sẵn của hệ thống điều khiển dòng truyền động này, khách hàng có thể chọn các tùy chọn sau: 2 HI: Dẫn động hai bánh, tỷ số truyền cao, 4 HI: Dẫn động bốn bánh, tỷ số truyền cao, 4 LO: Dẫn động bốn bánh, hộp số thấp tỉ lệ.
EST: Hệ thống FRRD (Chạy miễn phí khác biệt)
Hệ thống SOTF (Shift On The Fly) cho xe ô tô thông thường là loại FRRD. Sportage, mẫu KIA 4WD trước đây, đã kết hợp hai loại hệ thống SOTF, một là hệ thống trung tâm bánh xe tự động loại CAM được sử dụng cho đến mẫu xe năm 1999, loại còn lại là hệ thống trung tâm bánh xe tự động kiểu chân không.
Loại chân không có hiệu suất tốt hơn loại CAM. Nhưng nó vẫn có một vấn đề như rò rỉ không khí trong một trung tâm luôn được tiếp xúc.
FRRD được lắp ở trục trước. Người lái xe chọn chế độ 4WD, động cơ bơm khí được cung cấp năng lượng và khớp ly hợp chó sẽ kết nối trục các đăng phía trước và trục dẫn động phía trước. Nếu một ổ đĩa chọn chế độ 2WD khi lái xe, ly hợp chó sẽ được ngắt để ngắt lực truyền động đến trục truyền động.
Vi sai chạy tự do (FRRD)
Khi chế độ 4H hoặc 4L được chọn, trục bánh răng vi sai được kết hợp với ly hợp chó được cố định trên vỏ vi sai, FRRD hoạt động như một bộ vi sai thông thường. Động cơ bơm không khí FRRD tạo ra áp suất không khí để vận hành bộ truyền động đẩy ly hợp chó. Động cơ được kích hoạt bởi mô-đun điều khiển EST ở chế độ 4H hoặc 4L. Ở chế độ 2H, động cơ bơm khí FRRD không được kích hoạt. Bộ ly hợp chó trong FRRD không được tham gia. Tại thời điểm này, trục bánh răng không được cố định trên vỏ vi sai và nó quay tự do. Vì vậy, kết nối mô-men xoắn giữa trục trước được kết nối với các bánh răng bên của FRRD và trục các đăng phía trước được nối với vỏ FRRD bị ngắt kết nối.
① Khi người lái chọn chế độ 4H, nguồn điện sẽ cấp cho động cơ bơm khí.
② Hiện tại, trục các đăng phía trước bắt đầu quay và chênh lệch tốc độ giữa vỏ trong và vỏ ngoài gần như giống nhau.
③ Áp suất không khí được nạp vào bên trong máy bơm không khí.
④ Áp suất đẩy vòng cam và ly hợp chó và hộp bên trong được ghép với nhau tạo thành chế độ 4WD.
⑤ Nếu người lái chọn chế độ 2H, lực truyền động sẽ bị ngắt bên trong chuyển động và nguồn của máy bơm không khí sẽ bị ngắt.
⑥ Vòng cam quay trở lại bằng một lò xo hồi vị, kết nối với vỏ bên trong sẽ tắt ở chế độ 2WD.
Dòng điện 2WD điều kiện
Hệ thống chân không được sử dụng để kéo và ngắt trục trước bao gồm các thành phần sau. Hai van chuyển mạch chân không được sử dụng để điều khiển cơ cấu chấp hành chân không. Không thể xác định được các van chuyển mạch chân không này bằng màu sắc của chúng. Về chức năng của chúng, các van điện từ chân không không giống nhau. Một van thường đóng trong khi van còn lại thì ngược lại. Khi đánh lửa BẬT và chọn 2WD, cả hai ống dẫn điện đều được BẬT. Do đó chân không được cung cấp cho buồng nằm ở phía bên của chênh lệch và áp suất khí quyển được cung cấp cho buồng kia. Thao tác này sẽ di chuyển ngã ba sang vị trí bị ngắt kết nối. Khi chọn 4WD, cả hai van điện từ chân không đều được tắt. Điều này làm cho áp suất chân không / khí quyển thay đổi phía mà chúng tác động lên, làm cho bộ truyền động chuyển động và tham gia vào trục trước. Ngay sau khi 4WD được kích hoạt hoàn toàn, đèn liên tục BẬT. Chú ý đến kết nối ống, nếu các ống được hoán đổi, FRRD sẽ tham gia trong chế độ 2WD, nhưng ngắt ở 4WD vì chân không bị mất. Do đó 4WD không khả dụng trong trường hợp này. Không có mã lỗi, trong trường hợp phích cắm điện hoặc ống cấp chân không bị lẫn lộn.
Dòng điện 4WD điều kiện
Khi người lái bật công tắc 4WD, bộ phận điều khiển nhận được tín hiệu nối đất (4WD), kết quả là phuộc chuyển số được chuyển động bởi động cơ điện và kết nối đĩa xích / xích với trục đầu ra. Ngoài ra FRRD cũng được kích hoạt kết nối trục trước, do đó lực lái được truyền qua trục sau và trục trước đồng đều (50/50).
Dòng điện 4WD thấp
Khi người lái bật công tắc 4WD thấp, bộ điều khiển sẽ nhận được tín hiệu nối đất (4WD LOW). Lưu ý: để sử dụng 4WD ở mức thấp, xe phải dừng hoàn toàn vì không có cơ cấu đồng bộ hóa nào để kết nối đầu ra hành tinh với trục đầu ra. Hoạt động về cơ bản giống với 4WD cao, nhưng lần này bộ số hành tinh cũng được kích hoạt bởi phuộc chuyển số thứ hai, để giảm xảy ra, do đó tăng mô-men xoắn có sẵn ở các bánh xe.
Hệ thống Mô-men xoắn theo yêu cầu (TOD)
Hệ thống mô-men xoắn theo yêu cầu hoặc đôi khi là ATT: Truyền mô-men xoắn chủ động truyền điện tử và mô-men xoắn từ phía sau ra phía trước theo yêu cầu, tăng cường khả năng bám đường địa hình, xử lý nhanh nhẹn và đánh lái chính xác. Hệ thống TOD là một loại hệ thống dẫn động 4 bánh toàn thời gian và tên đầy đủ của nó là ‘Mô-men xoắn theo yêu cầu’. TOD là thương hiệu của Borg Warner tại Hoa Kỳ. 4WD theo yêu cầu: Hệ thống 4WD cung cấp năng lượng phần lớn thời gian cho chỉ bánh sau của xe cơ bản dẫn động cầu sau (RWD) hoặc chỉ cho bánh trước trong xe cơ bản dẫn động cầu trước (FWD ). Hộp chuyển số, hoặc hộp số tương đương, truyền lực tới bộ bánh xe kia khi các bánh xe dẫn động cơ bản bắt đầu trượt. Hình ảnh cho thấy sự khác biệt lớn về phân phối mô-men xoắn trong quá trình tham gia 4WD giữa EST và hệ thống TOD: trong EST mô-men xoắn được phân phối 50: 50, trong TOD, mô-đun điều khiển linh hoạt và được điều khiển theo tín hiệu đầu vào. Về cơ bản tỷ lệ phân chia mô-men xoắn sẽ là 0: 100 (đó là tình huống ‘FR’) khi lái xe trên đường với tốc độ xe thấp và trung bình. Nếu có bất kỳ độ trượt nào trên bánh sau, lượng mô-men xoắn tối ưu sẽ được phân phối đến bánh trước để có được hiệu suất lái ổn định. Phạm vi tỷ lệ phân chia mô-men xoắn là từ 0: 100 đến 50:50. Nó có nghĩa là lượng mô-men xoắn cực đại của bánh trước không được cao hơn bánh sau trong bất kỳ loại đường hoặc điều kiện phương tiện nào.
Bố cục hệ thống TOD
Như được chỉ ra trong hình, trục trước của hệ thống TOD không được trang bị hệ thống FRRD, nhưng được kết nối mọi lúc. Do đó, một bộ vi sai phía trước thông thường được áp dụng. Công tắc chỉ cho phép chọn giữa hai chế độ: Tự động: mô-men xoắn được phân phối tự động dưới sự điều khiển của TCCM. Hệ dẫn động 4WD hoạt động “theo yêu cầu”. Tỷ lệ phân phối mô-men xoắn động cơ tối ưu giữa phía trước và phía sau được điều khiển bởi hộp chuyển TOD. Hộp chuyển này được điều khiển và vận hành bởi mô-đun điều khiển độc lập, TCCM (Mô-đun điều khiển trường hợp chuyển) và nó nằm dưới đệm va chạm ở phía hành khách. Tỷ số truyền mô-men xoắn tới phía trước và phía sau không cố định và nó được thay đổi và kiểm soát liên tục tùy thuộc vào đường và điều kiện lái xe. Danh sách dưới đây cho thấy sự phân bổ mô-men xoắn gần đúng trong các điều kiện lái xe nhất định. Dưới đây: 4WD được sử dụng mọi lúc và bánh răng hành tinh giảm tốc được tham gia để đạt được mô-men xoắn cao hơn ở các bánh xe.
Chuyển giao xây dựng
Cấu tạo chung của bộ chuyển số rất giống với hệ thống EST, nhưng phần tham gia 4WD được thay đổi từ loại cơ khí với phuộc sang số sang loại ly hợp nhiều đĩa. Hoạt động của ly hợp này rất giống với hệ thống ly hợp được sử dụng trong ITM của Sportage. Nếu cần 4WD, ly hợp điện từ được kích hoạt, do đó thu hút đĩa áp dụng. Đến lượt đĩa, đĩa sẽ làm cho đường dốc bi giảm tốc độ, do đó các viên bi thép sẽ di chuyển trên đường dốc và tạo áp lực lên bộ ly hợp nhiều đĩa: 4WD được tham gia. Khi trục trước được kết nối mọi lúc, điều đó có nghĩa là trục các đăng đã quay ngay cả trong hệ dẫn động 2WD (dẫn động bởi trục trước), do đó việc ngắt kết nối và kết nối có thể được thực hiện rất trơn tru. Mô-men xoắn cung cấp cho trục trước phụ thuộc vào dòng điện cung cấp cho cuộn dây (lực từ), vì lượng áp lực lên ly hợp nhiều đĩa được tạo bởi đường dốc bi phụ thuộc vào lực hút của đĩa cam. Ở phía bên phải, dòng điện và trình tự kích hoạt của hệ thống được chỉ ra. Tín hiệu chính là cảm biến tốc độ phía trước và phía sau và tín hiệu chân ga. Dựa trên điều này, ATT ECU sẽ kích hoạt ly hợp từ tính, do đó kích hoạt ly hợp nhiều cấp thông qua đường dốc bóng. Điều này cho phép truyền mô-men xoắn tới trục các đăng phía trước (thông qua đĩa xích và xích).
Tín hiệu đầu vào và đầu ra
TCCM cần một số tín hiệu đầu vào để kiểm soát hệ thống thích hợp. Các tín hiệu đầu vào này là: Cảm biến vị trí động cơ, để biết vị trí của động cơ chuyển số đối với tương tác thấp 4WD. Công tắc Tự động / thấp để biết chế độ tự động hoặc 4WD thấp được chọn. Trong trường hợp hộp số tự động tín hiệu N từ rơ le trung tính. Rơ le trung tính được điều khiển bởi công tắc Bộ ức chế. Trong trường hợp hộp số tay, công tắc ly hợp. Điều này là để đảm bảo AT ở trạng thái trung lập và đối với MT rằng ly hợp được nhấn (tương tự như trung tính), để dễ dàng tham gia vào phần thấp. Đầu vào từ cảm biến tốc độ bánh xe để phát hiện điểm dừng của xe đối với mức tương tác thấp của 4WD nếu 4WD ở mức thấp được chọn và để phát hiện trượt bánh (trước / sau) trong trường hợp chế độ tự động. Tín hiệu TPS để quyết định phân phối mô-men xoắn tới trục trước / sau trong trường hợp chế độ tự động. Công tắc phanh để phát hiện phân bố tình trạng phanh trong khoảng từ 0: 100 đến 10 đến 90 tùy thuộc vào tốc độ bánh xe trục trước trục sau (để phanh ổn định và quãng đường phanh ngắn). Tín hiệu ABS từ bộ phận ABS để phát hiện ABS đang hoạt động, trong trường hợp này, tỷ lệ mô-men xoắn là 30: 70 để có được tình trạng phanh ổn định. Sau khi xử lý tín hiệu đầu vào này, TCCM điều khiển các tín hiệu đầu ra sau: động cơ Shift để gắn và ngắt phần thấp. Bộ ly hợp điện từ để kiểm soát chia sẻ mô-men xoắn giữa phía trước và phía sau. Đèn thấp và đèn 4WD để thông báo tình trạng cho người lái xe và thông báo về sự cố hiện có (đèn 4WD nhấp nháy). Kết quả chẩn đoán đầu ra cho người kiểm tra (K-Line) và trong trường hợp hộp số tự động, tín hiệu thấp tới bộ điều khiển truyền dẫn để điều khiển ca được thông qua. Mục đích của tín hiệu này là điều chỉnh kiểu chuyển số để giảm tỷ số truyền tổng thể.